| 撰寫/攝影 |
郭俊廷 |
| 前情提要 |
|
| 時間 |
1~2 小時 |
材料表 |
- NVIDIA® Jetson
![™]() TX2 NX TX2 NX
- Linux作業系統電腦 x 1
- 鍵盤滑鼠
- USB TO micro USB線
- 90W功率的DC變壓器
- SAMSUNG EVO Plus 500GB SSD
|
| 成本 |
|
| 難度 |
★★☆☆☆ |
|
NVIDIA® Jetson![™]() TX2 NX介紹
TX2 NX介紹
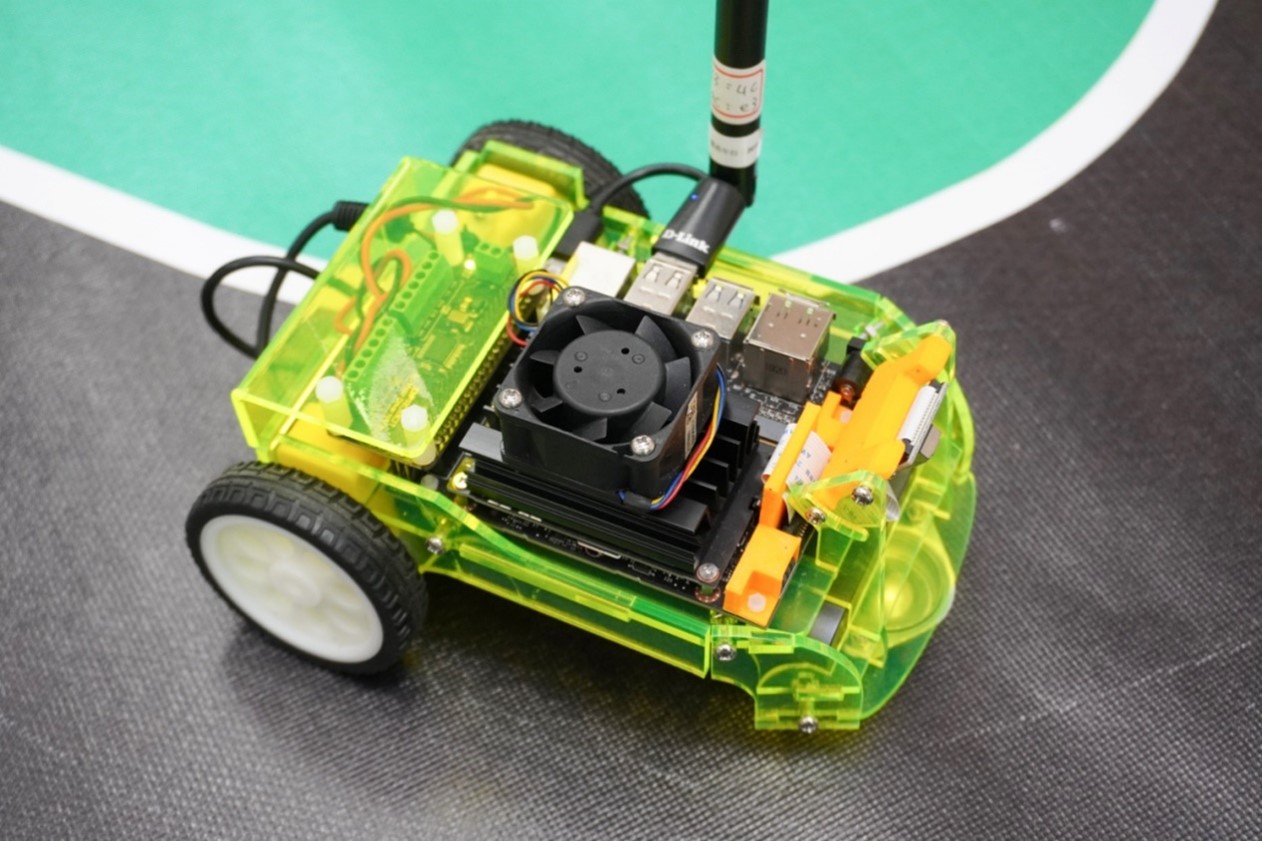
以下是我們的 NVIDIA® Jetson![™]() TX2 NX 套件外觀與使用情境
TX2 NX 套件外觀與使用情境
![]()
![]()
接著來看一下NVIDIA Jetson TX2 NX原廠網站的介紹
NVIDIA ® Jetson ![™]() TX2 NX 讓入門級嵌入式和邊緣產品的 AI 性能更上一層樓。它提供高達 Jetson Nano 2.5 倍的性能,並與 Jetson Nano 和 Jetson Xavier
TX2 NX 讓入門級嵌入式和邊緣產品的 AI 性能更上一層樓。它提供高達 Jetson Nano 2.5 倍的性能,並與 Jetson Nano 和 Jetson Xavier![™]() NX 有相同的外形尺寸和引腳的兼容性。
NX 有相同的外形尺寸和引腳的兼容性。
這個小模塊為整個 AI 打包了硬體加速器,而 NVIDIA JetPack ![™]() SDK 提供了您在應用程序中使用它們所需的工具。使用來自 NVIDIA NGC
SDK 提供了您在應用程序中使用它們所需的工具。使用來自 NVIDIA NGC ![™]() 和 NVIDIA TAO 工具包的預訓練 AI 模型,自定義 AI 網路開發變得容易,容器化部署使您的產品更新變得更靈活和無縫。
和 NVIDIA TAO 工具包的預訓練 AI 模型,自定義 AI 網路開發變得容易,容器化部署使您的產品更新變得更靈活和無縫。
易於開發和部署速度——再加上外形尺寸、性能和功耗優勢的獨特組合——使 Jetson TX2 NX 成為理想的大眾市場 AI 產品平台。
接著介紹NVIDIA ® Jetson ![™]() TX2 NX的產品技術規格
TX2 NX的產品技術規格
| 技術規格 |
| AI 效能 |
1.33 TFLOPS |
| GPU |
NVIDIA Pascal![™]() 架構,配備 256 個 NVIDIA CUDA 核心 架構,配備 256 個 NVIDIA CUDA 核心 |
| CPU |
雙核心 Denver 2 64 位元 CPU 與四核心 ARM A57 Complex |
| 記憶體 |
4 GB 128 位元 LPDDR4
51.2 GB/s |
| 儲存空間 |
16 GB eMMC 5.1 |
| 電源 |
7.5W | 15W |
| PCIe |
1 x1 + 1 x2
PCIe Gen2, total 30 GT/s |
| CSI 相機 |
最多至 5 個相機
(透過虛擬頻道 12 個)
12 個 MIPI CSI-2 D-PHY 通道
D-PHY 1.2 (最高 30 Gbps) |
| Video Encode |
1x 4K60 | 3x 4K30 | 4x 1080p60 | 8x 1080p30 (H.265)
1x 4K60 | 3x 4K30 | 7x 1080p60 | 14x 1080p30 (H.264) |
| 影片編碼 |
2x 4K60 | 4x 4K30 | 7x 1080p60 | 14x 1080p30 (H.265 & H.264) |
| 顯示 |
2 multi-mode DP 1.2/eDP 1.4/HDMI 2.0
1x 2 DSI (1.5Gbps/lane) |
| 連線能力 |
10/100/1000 BASE-T Ethernet |
| 機械規格 |
69.6 mm x 45 mm
260-pin SO-DIMM edge 接頭 |
再來比較我們常用的四種 Jetson 模組規格
比較 NVIDIA Jetson 模組規格
|
|
Jetson Nano |
TX2 NX |
Jetson Xavier NX 16GB |
Jetson AGX Xavier 64GB |
| 人工智慧效能 |
472 GFLOPS |
1.33 TFLOPS |
21 TOPS |
32 TOPS |
| GPU |
128 核心 NVIDIA Maxwell![™]() GPU GPU |
256 核心 NVIDIA Pascal![™]() GPU GPU |
具備 48 個 Tensor 核心的 384 核心 NVIDIA Volta![™]() GPU GPU |
具備 64 個 Tensor 核心的 512 核心 NVIDIA Volta GPU |
| CPU |
四核心 ARM® Cortex®-A57 MPCore 處理器 |
雙核心 Denver 2 64 位元 CPU 與四核心 Arm Cortex-A57 MPCore 處理器 |
6 核心 NVIDIA Carmel Arm®v8.2 64 位元 CPU 6MB L2 + 4MB L3 |
8 核心 NVIDIA Carmel Arm®v8.2 64 位元 CPU 8MB L2 + 4MB L3 |
| 記憶體 |
4GB 64 位元 LPDDR4 25.6GB/秒 |
4GB 128 位元 LPDDR4 51.2GB/秒 |
16GB 128 位元 LPDDR4x 59.7GB/秒 |
64GB 256 位元 LPDDR4x 136.5GB/秒 |
| 儲存空間 |
16GB eMMC 5.1 |
16GB eMMC 5.1 |
16GB eMMC 5.1 |
32GB eMMC 5.1 |
| 功耗 |
5W | 10W |
7.5W | 15W |
10W | 15W | 20W |
10W | 15W | 30W |
| 機械規格 |
69.6mm x 45mm
260 針型 SO-DIMM 接頭 |
69.6mm x 45mm
260 針型 SO-DIMM 接頭 |
69.6mm x 45mm
260 針型 SO-DIMM 接頭 |
100mm x 87mm
699 針型接頭
組合型板式熱交換器 |
更多的模組資料請參考原廠網站
系統安裝
接著要介紹如何安裝系統至內建的eMMC裡面,由於目前(2022年)新出產的Jetson TX2 NX以及Jetson Xavier NX都無內建SD卡卡槽,所以需要把系統燒錄至內建的eMMC裡面。
首先請準備一台安裝Linux作業系統的電腦,本文中使用的作業系統為Ubuntu 18.04 LTS,建議使用此版本,Ubuntu 20.04 LTS目前經測試使用最新板NVIDIA SDK Manager會無法正常使用。
安裝JetPack4.5(經測試目前TX2 NX使用此底板無法透過NVIDIA SDK Manager正常安裝JetPack4.6稍後會介紹使用指令安裝方法,如更新後可正常安裝會在本文更新)
Step 1.
首先要準備一台安裝Linux作業系統的電腦,本文中使用的作業系統為Ubuntu 18.04 LTS。
Step 2.
到NVIDIA網站上下載NVIDIA SDK Manager,本文中使用的版本為1.7.2-9007:https://developer.nvidia.com/nvidia-sdk-manager
Step 3.
下載後點擊檔案並選擇install按鈕即可安裝,也可以打開terminal,前往檔案所在資料夾後,輸入以下指令安裝對應版本的程式。
sudo apt install ./sdkmanager-[version].deb
Step 4.
安裝好後,搜尋SDK Manager就可以點擊後開啟以下畫面。
![]()
也可以在terminal中輸入以下指令開啟。
![]()
畫面開啟後要登入 NVIDIA 開發者帳號,還沒有帳號請先註冊(免費)。
![]()
Step 5.
接下來需要確認所有的硬體裝置都準備完成,你現在正在使用的電腦(Host Machine)跟Jetson![™]() TX2 NX(Target Hardware)有連接在一塊並在同一個網域下(透過電腦的USB線連接到Jetson
TX2 NX(Target Hardware)有連接在一塊並在同一個網域下(透過電腦的USB線連接到Jetson![™]() TX2 NX的Micro USB孔),並選擇JetPack 4.5.1,並且重新讀取開發版選擇開發板Jetson TX2 NX,DeepStream不要打勾,即可進入下一步。
TX2 NX的Micro USB孔),並選擇JetPack 4.5.1,並且重新讀取開發版選擇開發板Jetson TX2 NX,DeepStream不要打勾,即可進入下一步。
如果第一次下載還找不到開發板定義檔,請先勾選 Host Machine 下載到本機端。
![]()
如果已經下載過檔案到本機端過,可以取消勾選Host Machine,直接安裝系統到Jetson TX2 NX當中。
![]()
注意,開發板在此要選擇 Jetson TX2 modules (系統會自動判斷為Jetson TX2 NX)
![]()
接著選擇TARGET OPERATING SYSTEM(目標系統)為JetPack 4.5.1(rev.1),即可進入下一步。
![]()
Step 6.
接著要選擇要下載那些套件,本文中按照預設會全部下載並安裝,記得要勾選下方的 accept license,如果要馬上安裝的話,請不要勾選 Download now. Install later。如果只是想要先下載之後再安裝,則可勾選。
![]()
Step 7.
接下來,需要一些時來的下載與安裝(如果是第一次下載會花比較多時間下載,下載過一次後就不用重新下載)。這時候請記得先把Jetson TX2 NX 接上銀幕、鍵盤、滑鼠,後續要建立登入的帳號密碼。
下載好會開始安裝Jetson OS 就是Jetson TX2 NX的Ubuntu作業系統,安裝完之後要先建立一組帳號密碼才可以繼續安裝其他套件。開機後會出現如下圖的安裝步驟,選擇鍵盤類型、地區時間、帳號密碼等資訊。這些系統設定之後都可以修改。
![]()
出現桌面,代表帳號建立成功了!![]()
在 SDK Manager 中輸入剛剛建立的帳號密碼,就可以繼續安裝Jetson SDK Components
![]()
如果是要重新安裝之前已安裝好的系統,則會跳出以下畫面,輸入你的帳號密碼就可以開始重新安裝系統。
![]()
Step 8.
SDK Manager 看到這個畫面(右下角出現FINISH and EXIT)就代表下載燒錄完成囉!由於內建的eMMC容量只有16G,在安裝完所有套件後空間將剩餘不多,必須將系統移動到SSD開機。
![]()
使用指令燒錄系統方法
由於JetPack4.6 會因為載板與NVIDIA SDK Manager,在安裝時會發生錯誤,原廠建議我們使用指令燒錄系統,以下將介紹如何使用指令燒錄系統。
Step 1.
首先先讓板子進入 Recovery Mode,做法是用 jumper 插上pin9 與 pin10(FC REC,GND),之後再通電,如下圖紅框處:
![]()
Step 2.
接著一樣使用NVIDIA SDK Manager下載JetPack4.6相關套件並且不要安裝。
Step 3.
接著移動到 JetPack4.6 的資料夾 JetPack_4.6_Linux_JETSON_TX2_TARGETS/Linux_for_Tegra的位置,執行以下指令(根據你所下載的路徑不同位置也不同)
cd ~/nvidia/nvidia_sdk/JetPack_4.6_Linux_JETSON_TX2_TARGETS/Linux_for_Tegra
Step 4.
接著使用以下指令進行燒錄
sudo ./flash.sh jetson-xavier-nx-devkit-tx2-nx mmcblk0p1
如想了解更多SDK安裝流程問題請參考NVIDIA原廠說明
將系統移動到SSD開機
安裝完系統及相關套件之後,板子原本的 16G eMMC 裡面已經快滿了,需將系統移動到 SSD 來開機。由於Jetson TX2 NX目前無法預設將系統燒錄至SSD開機,所以需要先將系統燒錄至eMMC,再將系統由eMMC複製到SSD開機。
在此使用 forecr_scripts 的 change_rootfs_storage_direct-emmc_to_ssd 專案將系統移動至SSD開機
如果這顆 SSD 是全新拆封之前都未用過的話,需要將其格式化成 Jetson TX2 NX 可讀之系統,請參考以下文章 [在Jetson Xavier NX上以SSD運行作業系統] 中的格式化SSD一段
接著下載移動系統到SSD下載點,解壓縮後可以看到 change_rootfs_storage_direct-emmc_to_ssd.sh 這個檔案。
接著,設定該腳本權限,並執行它:
ls -l change_rootfs_storage_direct-emmc_to_ssd.sh
chmod +x change_rootfs_storage_direct-emmc_to_ssd.sh
ls -l change_rootfs_storage_direct-emmc_to_ssd.sh
sudo ./change_rootfs_storage_direct-emmc_to_ssd.sh /dev/nvme0n1p1
全部指令都執行完最後會如下圖顯示Reboot for changes to take effect,提示需要重新開機讓所有設定生效。
![]()
重開機後可以看到系統左下方出現SD卡選項,代表系統已經順利移動到SSD裡面了。
![]()
參考資料:
- https://www.forecr.io/blogs/bsp-development/change-root-file-system-to-m-2-ssd-directly
前言
文字……..
內文
NVIDIA® Jetson![™]() TX2 NX介紹
TX2 NX介紹
以下是我們的NVIDIA® Jetson![™]() TX2 NX套件的樣子以及使用情境
TX2 NX套件的樣子以及使用情境
01
02
接著來看一下NVIDIA Jetson TX2 NX原廠網站的介紹
NVIDIA ® Jetson ![™]() TX2 NX 讓入門級嵌入式和邊緣產品的 AI 性能更上一層樓。它提供高達 Jetson Nano 2.5 倍的性能,並與 Jetson Nano 和 Jetson Xavier
TX2 NX 讓入門級嵌入式和邊緣產品的 AI 性能更上一層樓。它提供高達 Jetson Nano 2.5 倍的性能,並與 Jetson Nano 和 Jetson Xavier![™]() NX 有相同的外形尺寸和引腳的兼容性。
NX 有相同的外形尺寸和引腳的兼容性。
這個小模塊為整個 AI 打包了硬體加速器,而 NVIDIA JetPack ![™]() SDK 提供了您在應用程序中使用它們所需的工具。使用來自 NVIDIA NGC
SDK 提供了您在應用程序中使用它們所需的工具。使用來自 NVIDIA NGC ![™]() 和 NVIDIA TAO 工具包的預訓練 AI 模型,自定義 AI 網路開發變得容易,容器化部署使您的產品更新變得更靈活和無縫。
和 NVIDIA TAO 工具包的預訓練 AI 模型,自定義 AI 網路開發變得容易,容器化部署使您的產品更新變得更靈活和無縫。
易於開發和部署速度——再加上外形尺寸、性能和功耗優勢的獨特組合——使 Jetson TX2 NX 成為理想的大眾市場 AI 產品平台。
接著介紹NVIDIA ® Jetson ![™]() TX2 NX的產品技術規格
TX2 NX的產品技術規格
技術規格
AI 效能
1.33 TFLOPS
GPU
NVIDIA Pascal![™]() 架構,配備 256 個 NVIDIA CUDA 核心
架構,配備 256 個 NVIDIA CUDA 核心
CPU
雙核心 Denver 2 64 位元 CPU 與四核心 ARM A57 Complex
記憶體
4 GB 128 位元 LPDDR4
51.2 GB/s
儲存空間
16 GB eMMC 5.1
電源
7.5W | 15W
PCIe
1 x1 + 1 x2
PCIe Gen2, total 30 GT/s
CSI 相機
最多至 5 個相機
(透過虛擬頻道 12 個)
12 個 MIPI CSI-2 D-PHY 通道
D-PHY 1.2 (最高 30 Gbps)
Video Encode
1x 4K60 | 3x 4K30 | 4x 1080p60 | 8x 1080p30 (H.265)
1x 4K60 | 3x 4K30 | 7x 1080p60 | 14x 1080p30 (H.264)
影片編碼
2x 4K60 | 4x 4K30 | 7x 1080p60 | 14x 1080p30 (H.265 & H.264)
顯示
2 multi-mode DP 1.2/eDP 1.4/HDMI 2.0
1x 2 DSI (1.5Gbps/lane)
連線能力
10/100/1000 BASE-T Ethernet
機械規格
69.6 mm x 45 mm
260-pin SO-DIMM edge 接頭
再來比較我們常用的四個Jetson 模組規格
比較 NVIDIA Jetson 模組規格
Jetson Nano
TX2 NX
Jetson Xavier NX 16GB
Jetson AGX Xavier 64GB
人工智慧效能
472 GFLOPS
1.33 TFLOPS
21 TOPS
32 TOPS
GPU
128 核心 NVIDIA Maxwell![™]() GPU
GPU
256 核心 NVIDIA Pascal![™]() GPU
GPU
具備 48 個 Tensor 核心的 384 核心 NVIDIA Volta![™]() GPU
GPU
具備 64 個 Tensor 核心的 512 核心 NVIDIA Volta GPU
CPU
四核心 ARM® Cortex®-A57 MPCore 處理器
雙核心 Denver 2 64 位元 CPU 與四核心 Arm Cortex-A57 MPCore 處理器
6 核心 NVIDIA Carmel Arm®v8.2 64 位元 CPU 6MB L2 + 4MB L3
8 核心 NVIDIA Carmel Arm®v8.2 64 位元 CPU 8MB L2 + 4MB L3
記憶體
4GB 64 位元 LPDDR4 25.6GB/秒
4GB 128 位元 LPDDR4 51.2GB/秒
16GB 128 位元 LPDDR4x 59.7GB/秒
64GB 256 位元 LPDDR4x 136.5GB/秒
儲存空間
16GB eMMC 5.1
16GB eMMC 5.1
16GB eMMC 5.1
32GB eMMC 5.1
功耗
5W | 10W
7.5W | 15W
10W | 15W | 20W
10W | 15W | 30W
機械規格
69.6mm x 45mm
260 針型 SO-DIMM 接頭
69.6mm x 45mm
260 針型 SO-DIMM 接頭
69.6mm x 45mm
260 針型 SO-DIMM 接頭
100mm x 87mm
699 針型接頭
組合型板式熱交換器
更多的模組資料請參考以下原廠網站
https://www.nvidia.com/zh-tw/autonomous-machines/embedded-systems/
系統安裝
接著要介紹如何安裝系統至內建的eMMC裡面,由於目前(2022年)新出產的Jetson TX2 NX以及Jetson Xavier NX都無內建SD卡卡槽,所以需要把系統燒錄至內建的eMMC裡面。
首先請準備一台安裝Linux作業系統的電腦,本文中使用的作業系統為Ubuntu 18.04 LTS,建議使用此版本,Ubuntu 20.04 LTS目前經測試使用最新板NVIDIA SDK Manager會無法正常使用。
安裝JetPack4.5(經測試目前TX2 NX使用此底板無法透過NVIDIA SDK Manager正常安裝JetPack4.6稍後會介紹使用指令安裝方法,如更新後可正常安裝會在本文更新)
Step 1.
首先要準備一台安裝Linux作業系統的電腦,本文中使用的作業系統為Ubuntu 18.04 LTS。
Step 2.
到NVIDIA網站上下載NVIDIA SDK Manager,本文中使用的版本為1.7.2-9007。
網站如下:
https://developer.nvidia.com/nvidia-sdk-manager
Step 3.
下載後點擊檔案並選擇install按鈕即可安裝。
也可以打開terminal,前往檔案所在資料夾後,輸入以下指令安裝對應版本的程式。
sudo apt install ./sdkmanager-[version].deb
Step 4.
安裝好後,搜尋SDK Manager就可以點擊後開啟以下畫面。
03
也可以在terminal中輸入以下指令開啟。
sdkmanager
04
畫面開啟後要登入NVIDIA帳號,還沒有帳號需要先註冊(免費)。
05
Step 5.
接下來需要確認所有的硬體裝置都準備完成,你現在正在使用的電腦(Host Machine)跟Jetson![™]() TX2 NX(Target Hardware)有連接在一塊並在同一個網域下(透過電腦的USB線連接到Jetson
TX2 NX(Target Hardware)有連接在一塊並在同一個網域下(透過電腦的USB線連接到Jetson![™]() TX2 NX的Micro USB孔),並選擇JetPack 4.5.1,並且重新讀取開發版選擇開發板Jetson TX2 NX,DeepStream不要打勾,即可進入下一步。
TX2 NX的Micro USB孔),並選擇JetPack 4.5.1,並且重新讀取開發版選擇開發板Jetson TX2 NX,DeepStream不要打勾,即可進入下一步。
如果第一次下載還沒有開發版 可以先勾選Host Machine下載到本機端。
06
如果已經下載過檔案到本機端過,可以取消勾選Host Machine,直接安裝系統到Jetson TX2 NX當中。
07
注意這裡要選擇開發版Jetson TX2 modules(系統會自動判斷為Jetson TX2 NX)
08
接著選擇TARGET OPERATING SYSTEM(目標系統)為JetPack 4.5.1(rev.1)即可進入下一步。
09
Step 6.
都確認好後就是選擇要下載的項目,本文中按照預設進行全部下載安裝,記得要勾選下方的accept license,如果要馬上安裝記得不要勾選Download now. Install later。如果你只是想要先下載還沒有要安裝,可以勾選Download now. Install later。
10
Step 7.
接下來就是會花一段時間的下載與安裝(如果是第一次下載會花比較多時間下載,下載過一次後就不用重新下載)。
這時候請記得先把Jetson TX2 NX 接上銀幕、鍵盤、滑鼠等等要用來建立帳號密碼
下載好會開始安裝Jetson OS 就是Jetson TX2 NX的Ubuntu作業系統,安裝完之後要先建立一組帳號密碼才可以繼續安裝其他套件。
會出現如下圖的安裝步驟,選擇鍵盤類型、地區時間、帳號密碼等資訊。
11
出現桌面的畫面後代表帳號建立成功。
12
把剛剛建立的帳號密碼輸入至以下出現的畫面就可以繼續安裝Jetson SDK Components
13
如果是要把之前安裝好的系統重新安裝會跳出以下畫面,輸入你的帳號密碼就可以開始重新安裝系統。
14
Step 8.
看到這個畫面就代表下載燒錄完成囉! 由於內建的eMMC容量只有16G,在安裝完所有套件後空間將剩餘不多,必須將系統移動到SSD開機。
15
接著介紹使用指令燒錄系統方法
由於JetPack4.6因為載板與NVIDIA SDK Manager安裝時會發生錯誤,原廠建議我們使用指令燒錄系統,以下將介紹如何使用指令燒錄系統。
Step 1.
首先先用將板子進入Recovery Mode
Recovery Mode的方法是先將jumper插上pin9與pin10(FC REC,GND)在通電。
如下圖紅框處:
16
Step 2.
接著一樣使用NVIDIA SDK Manager下載JetPack4.6相關套件並且不要安裝。
Step 3.
接著移動到JetPack4.6的資料夾JetPack_4.6_Linux_JETSON_TX2_TARGETS/Linux_for_Tegra的位置,執行以下指令(根據你所下載的路徑不同位置也不同)
cd ~/nvidia/nvidia_sdk/JetPack_4.6_Linux_JETSON_TX2_TARGETS/Linux_for_Tegra
Step 4.
接著使用以下指令進行燒錄
sudo ./flash.sh jetson-xavier-nx-devkit-tx2-nx mmcblk0p1
如想了解更多SDK安裝流程問題請參考原廠網站
https://docs.nvidia.com/sdk-manager/install-with-sdkm-jetson/index.html#install-with-sdkm-jetson
將系統移動到SSD開機
安裝完系統及相關套件到16G eMMC裡面已經沒有多少空間可用,需將系統移動到SSD開機。由於Jetson TX2 NX目前無法預設將系統燒錄至SSD開機,所以需要先將系統燒錄至eMMC,在將系統由eMMC複製到SSD開機。
我們使用forecr_scripts的change_rootfs_storage_direct-emmc_to_ssd專案將系統移動至SSD開機
首先如果是第一次使用該SSD需要將該SSD格式化成Jetson TX2 NX可讀之系統,請參考以下文章在Jetson Xavier NX上以SSD運行作業系統之Step 2. 格式化SSD
【教學】在Jetson Xavier NX上以SSD運行作業系統
接著下載移動系統到SSD下載點:
https://github.com/mistelektronik/forecr_scripts/blob/master/change_rootfs_storage_direct-emmc_to_ssd.zip
解壓縮後可以得到 change_rootfs_storage_direct-emmc_to_ssd.sh 的檔案
接著
將下載的腳本文件(sh檔)的權限設置為可執行文件並使用以下指令運行它:
ls -l change_rootfs_storage_direct-emmc_to_ssd.sh
chmod +x change_rootfs_storage_direct-emmc_to_ssd.sh
ls -l change_rootfs_storage_direct-emmc_to_ssd.sh
sudo ./change_rootfs_storage_direct-emmc_to_ssd.sh /dev/nvme0n1p1
全部指令都執行完最後會如下圖顯示Reboot for changes to take effect.提示你要重新開機。
17
重開機後可以看到系統左下方出現SD卡選項代表系統已經移動到SSD裡面了。
18
參考資料:
https://www.forecr.io/blogs/bsp-development/change-root-file-system-to-m-2-ssd-directly
















 TX2 NX
TX2 NX




















































































































































![新品開箱] NVIDIA® Jetson AGX Orin™ 開發套件開箱及系統安裝– CAVEDU教育團隊技術部落格](http://i.ytimg.com/vi/dDFUfgpRy0E/maxresdefault.jpg)




 開發套件開箱及系統安裝
開發套件開箱及系統安裝










































